

產(chǎn)品推薦
大躍儀器儀表以技術(shù)創(chuàng)新為核心,視產(chǎn)品質(zhì)量為生命,以顧客滿(mǎn)意為目標(biāo)。

法蘭式電磁流量計(jì)
公稱(chēng)通徑:DN3mm~DN3000mm
測(cè)量精度:示值的±0.5%,可選±0.3%或±0.2%
防護(hù)等級(jí):IP65、IP68
測(cè)量范圍(流速):(0-15)m/s
電磁流量計(jì)用途非常廣泛,它不但可以用來(lái)城市鄉(xiāng)鎮(zhèn)的供水、排水測(cè)量與計(jì)量,更可以廣泛地適用于石油、化工、鋼鐵、冶金、礦山開(kāi)采、農(nóng)業(yè)水利灌溉、污水處理、造紙、醫(yī)藥、食品等工、農(nóng)業(yè)部門(mén)的生產(chǎn)過(guò)程流量測(cè)量和控制

夾持式電磁流量計(jì)
公稱(chēng)通徑:10mm ~200mm
精度:示值的±0.5%,可選示值的±0.3%或±0.2%
結(jié)構(gòu)形式:一體型、分離型
儀表特點(diǎn):體積小巧,無(wú)連接法蘭,安裝維護(hù)更加簡(jiǎn)單方便
夾持式電磁流量計(jì)具有安裝、清洗方便等優(yōu)點(diǎn),常應(yīng)用于石油化工、鋼鐵冶金、給水排水、水利灌溉、水處理、環(huán)保污水總量控制、造紙、醫(yī)藥、食品等工、農(nóng)業(yè)部門(mén)的生產(chǎn)工藝過(guò)程流量測(cè)量和控制。

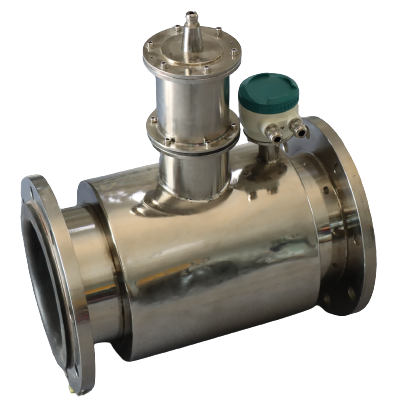
卡箍式電磁流量計(jì)
公稱(chēng)通徑:DN10—DN200mm
精度:±0.2% ±0.5%(示值誤差)
特點(diǎn)優(yōu)勢(shì):快速安裝結(jié)構(gòu),裝卸、維護(hù)、清洗更加方便
供電電源:220V/AC或24V/DC
卡箍式電磁流量計(jì)是采用不銹鋼材質(zhì),能夠很方便的景象快速拆卸、清洗,使電磁流量計(jì)在使用過(guò)程中不易被污染,且能有效防止測(cè)量流體殘余物在測(cè)量管中的堆積,可廣泛應(yīng)用于礦泉水、醬油、果醬、啤酒、果汁、米酒、牛奶
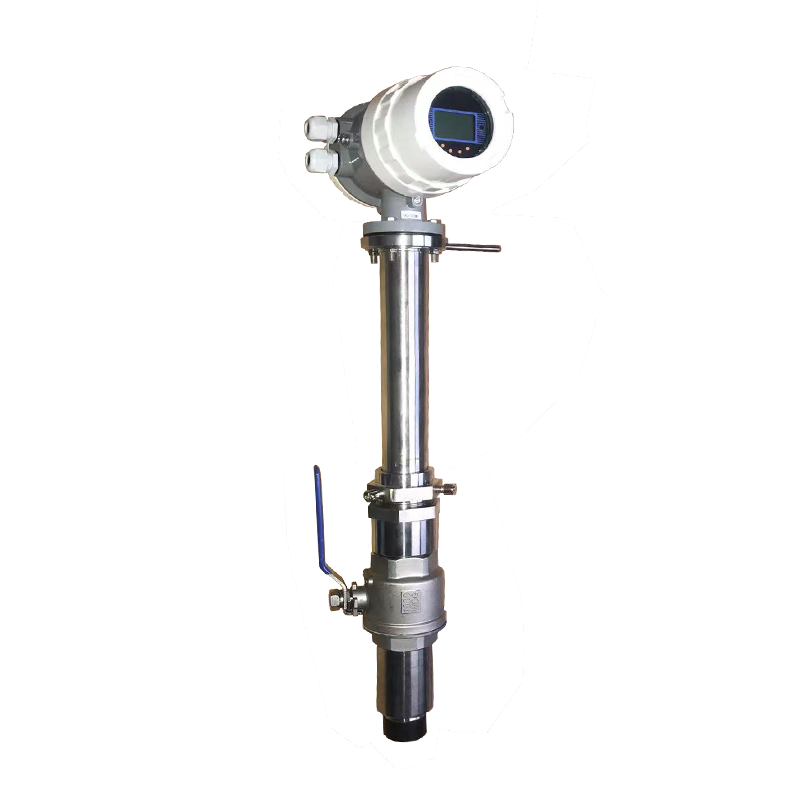
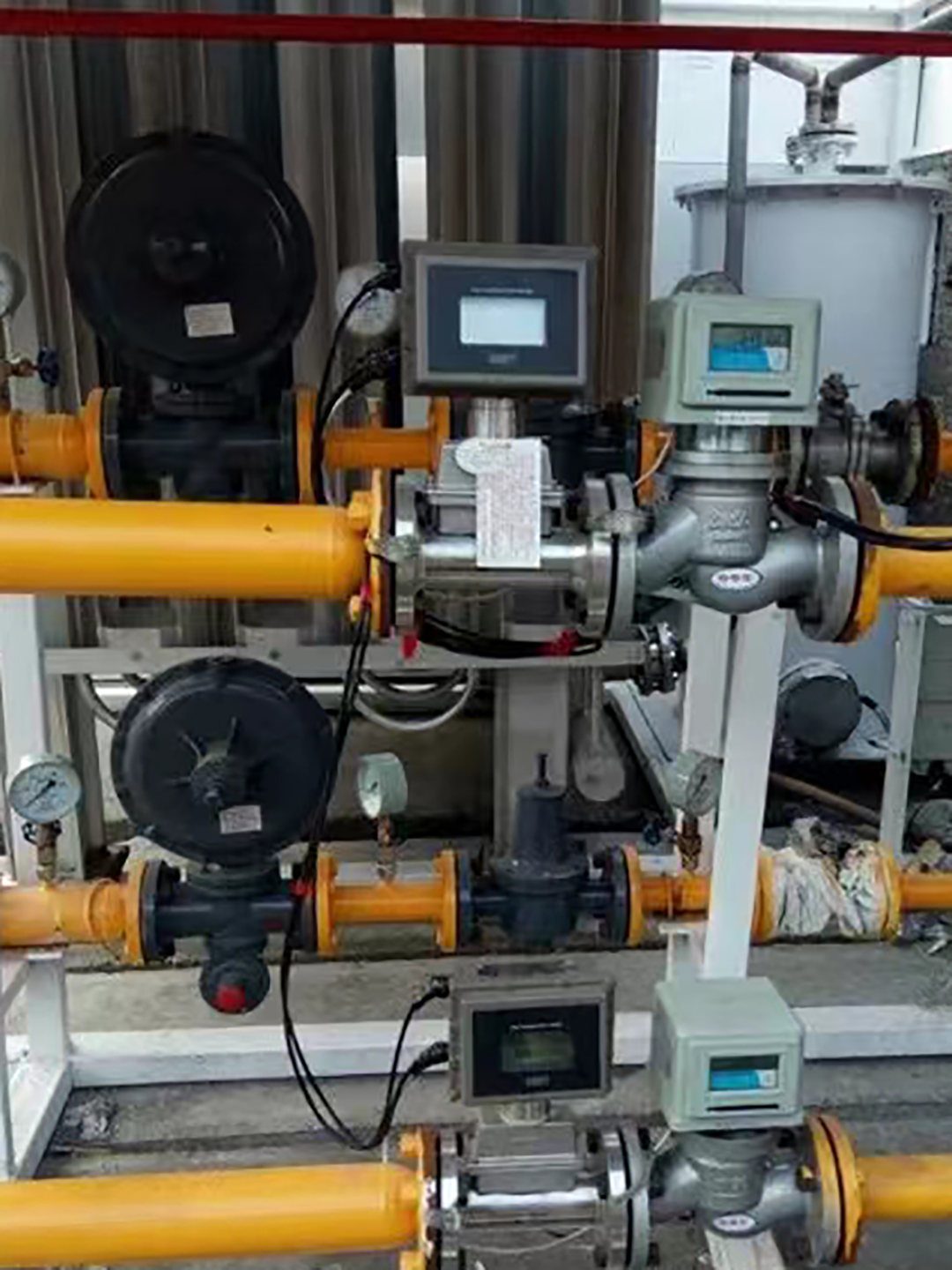
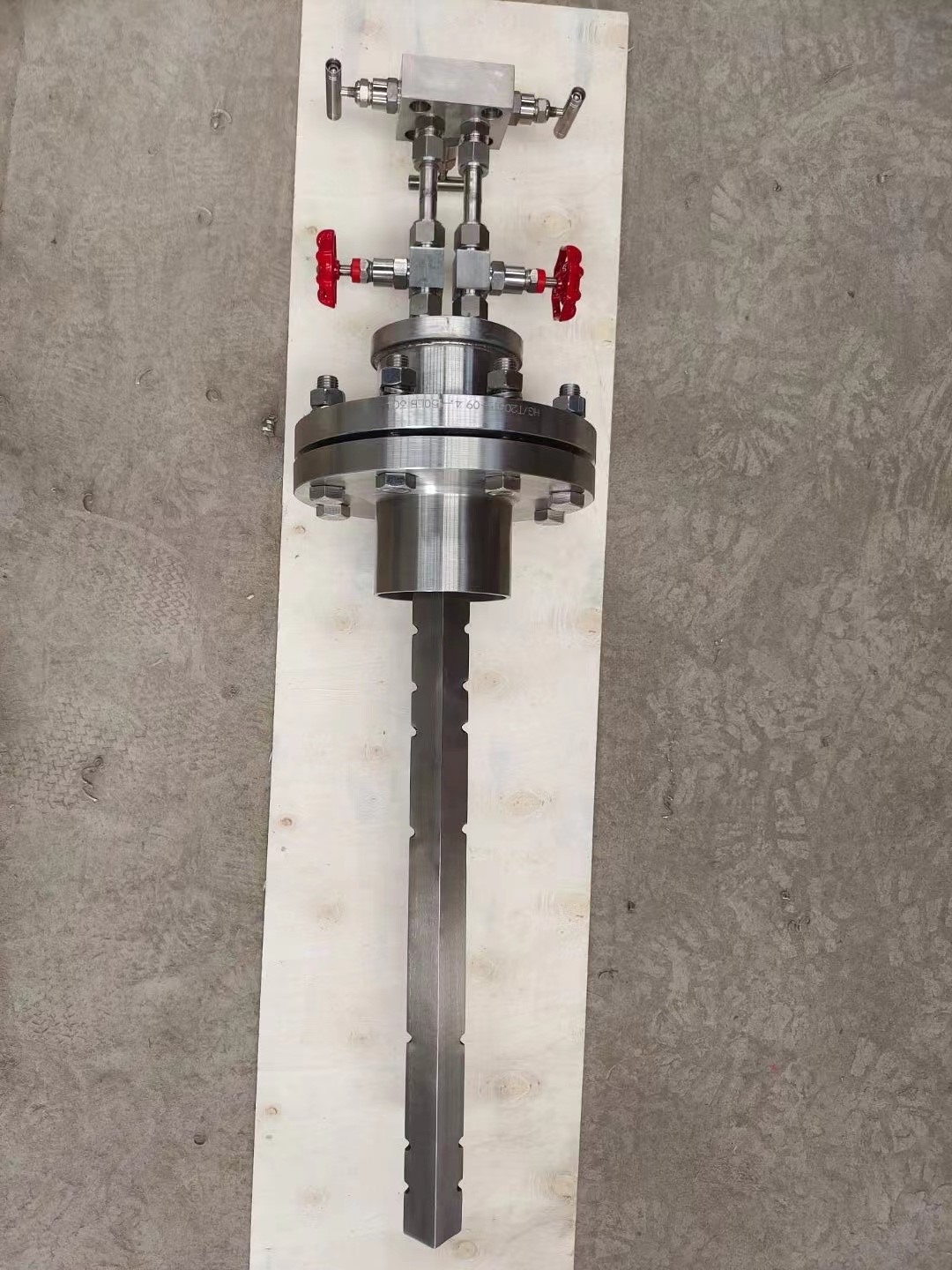
插入式電磁流量計(jì)
管道通徑:100mm-3000mm
流速范圍:0.1m/s~10m/s
精度:0.5~10m/s:±1.5%FS;0.1~0.5m/s:±2.0%FS 0.1~10m/s:±2.5%FS(FS指40%~-100%滿(mǎn)量程流量)
優(yōu)勢(shì)特點(diǎn):能夠在不斷流的情況下進(jìn)行安裝、拆卸
插入式電磁流量計(jì)主要用于測(cè)量封閉管道中的導(dǎo)電液體和漿液中的體積流量。包括酸、堿、鹽等強(qiáng)腐蝕性的液體。插入式電磁流量計(jì)廣泛應(yīng)用于石油、化工、冶金、紡織、食品、制藥、造紙等行業(yè)以及環(huán)保、市政管理,水利建設(shè)